Hello there,
Nice to meet you! I am a robot member of meLAB. I have lots of names: gesture-controlled delta robot, duck picker, crane machine, doll machine. People are calling me whatever they are having in mind. I am a robot that can follow your hand movement. When your fingers close, my gripper will also close. This video shows how I work:
I am always welcome at engineering events, such as our School Open Day of James Watt School of Engineering, University of Glasgow.

At the School Open Day, my demonstrators introduced me to those high school students who might come to our school to study engineering. I was very happy that they all liked me. There is always a queue in front of my desk. I hope they come to study engineering and make their own fancy machine like me.
I have also been to the Explorathon’19, a public engagement event for the children in Glasgow. Again, I was the most popular demonstration (thankfully this time I worked for a full day with only a few stoppages). As you can see from the photos, those kids liked me so much. I need at least 4 demonstrators to keep them in order. They were very lovely. Some of them asked the price of me-they wanted to buy me! My demonstrator answered: you can make your own robot if you become an engineer in the future (I won’t tell you the reason was I am not stable enough to sell). I hope I inspired them!

In the past three years, I have been demonstrated dozens of times in open days, exhibitions, social engagement activities, etc. I was happy to be there to make new friends, have fun with them, and arouse their interest in engineering.
Now you know how good I am.Let me show you myhistory. I have lots of different versions 1) Kinect 1.0(processing) + Arduino/myRIO/Raspberry pi, 2) Kinect 1.0(LabVIEW) + myRIO, 3) Kinect 2.0(LabVIEW) + Arduino/myRIO, plus 3 versions of body design.
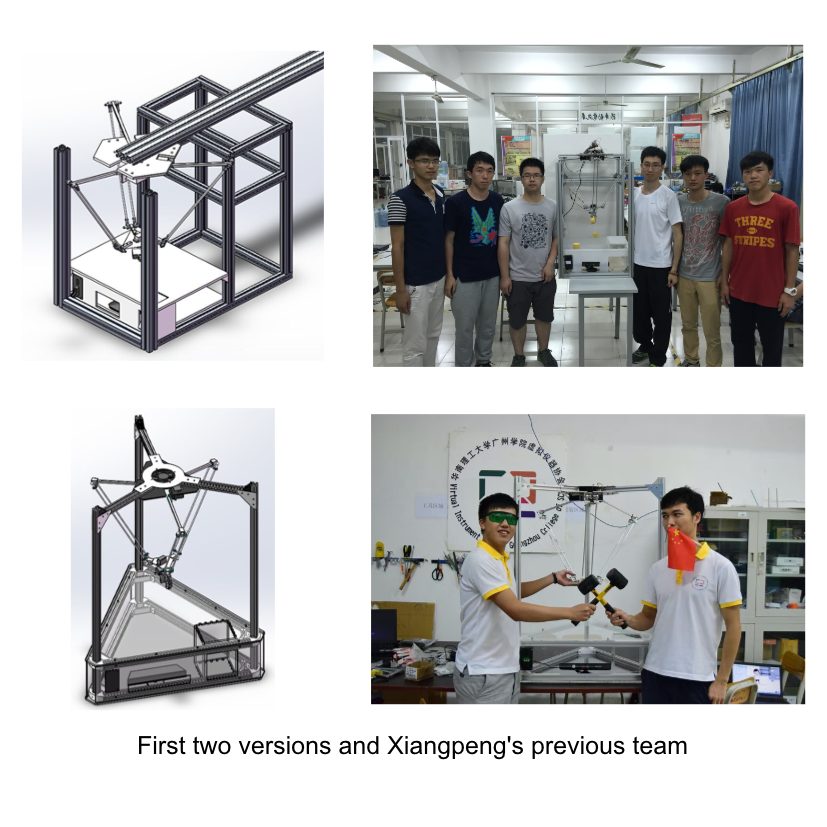
The primary idea of me, Kinect-controlled delta robot, was reported in [1]. Later on, Xiangpeng Liang and his previous team (Yusheng Wen, Jiahao Gao,Nuannuan Zheng et al.) in undergraduate made the first version (Kinect + myRIO)in around 2013. This prototype was demonstrated in NI Days, Beijing, 2016. Also, I won the first prize for “Challenge Cup” College Student Curricular Academic Science and Technology Works Competition of Guangdong Province.

After Xiangpeng joined meLAB in 2017 as a master student, the UK version of me was created by him, Léopold Deboosand Adnan Zahid led by Dr Hadi Heidari. I still remember they worked overnight in order to show me in the School Open Day the day after (30thAugust 2017). This was the first I was demonstrated in UK.

DuringXiangpeng’s absence of 2017-2018, I was improved by a master student, Andreas Kyriakou, using Kinect 2.0.
Another improvement in software was finished by Yongdian Sun (BEng student in 2018-2019) supervised by Xiangpeng, which was published in [2].
Afterwards, my mechanical structure was redesign by Elie Gautreau (Visitor from Icam, France) who is a young but smart and experienced mechanical engineer.
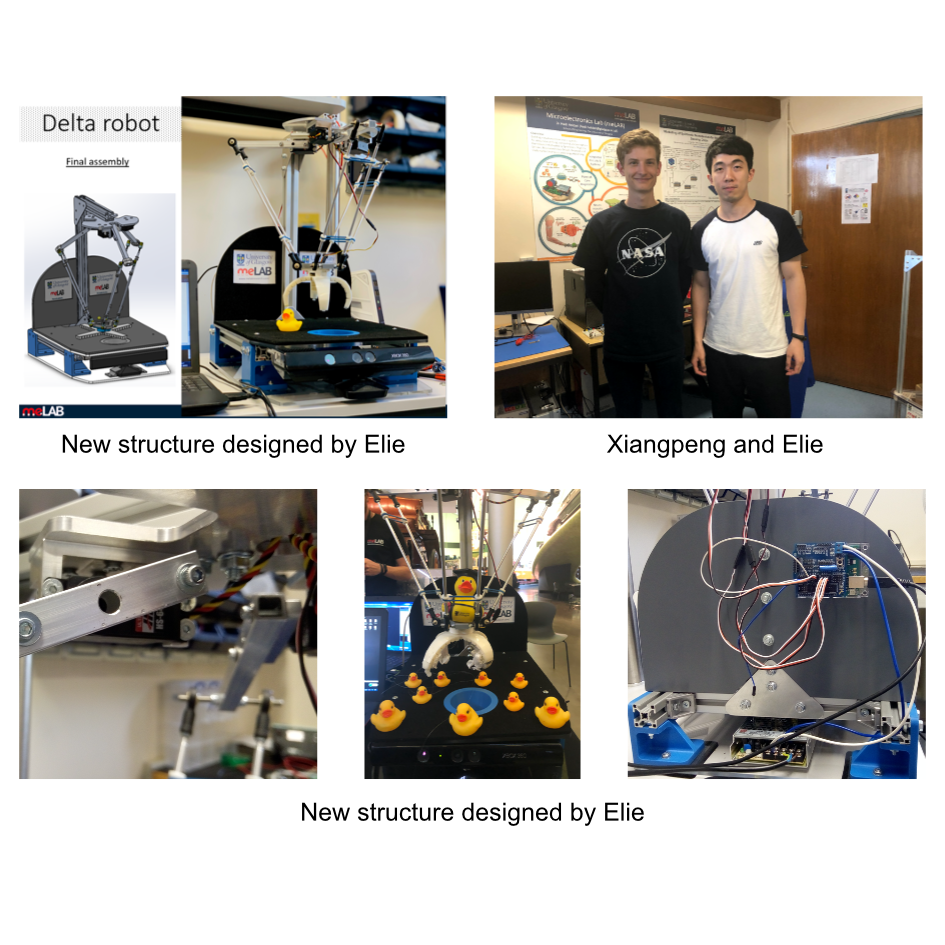
Look, I become smaller and more beautiful. I don’t need 4 people to carry me anymore. Also, Elie made a flexible gripper for me. I really like it! This is my favourite gripper ever! Let’s see how the latest version of me works:
Recently, my 5G friends, BurakKizilkaya, Zhen Meng,Dr. Guodong Zhao,Dr. Yusuf Sambo, Dr.Shuja Ansari et al., have started making a remote version of me. Let’s see what will happen!
Although I am not a main research topic in meLAB, I am happy to bring lots of fun to meLAB and my friends! I always appreciate those who are involved in developing me. Thank you!
Xiangpeng Liang is a research assistant who started with meLAB in 2017. He holds an M.Sc. in Mechatronics from the University of Glasgow, and a B.Sc. in Mechanical Engineering & Automation from Guangzhou College of South China University of Technology, China, 2016. His research interests include neuromorphic hardware, and wearable sensing systems.
[1] Melgar, E. R., & Diez, C. C. (2012). Arduino and kinect projects: Design, build, blow their minds. Apress.
[2] Sun, Y., Liang, X., Fan, H., Imran, M., & Heidari, H. (2019, August). Visual Hand Tracking on Depth Image using 2-D Matched Filter. In 2019 UK/China Emerging Technologies (UCET) (pp. 1-4). IEEE.



Comments
RSS feed for comments to this post