
At the School Open Day, my demonstrators introduced me to those high school students who might come to our school to study engineering. I was very happy that they all liked me. There is always a queue in front of my desk. I hope they come to study engineering and make their own fancy machine like me.
I have also been to the Explorathon’19, a public engagement event for the children in Glasgow. Again, I was the most popular demonstration (thankfully this time I worked for a full day with only a few stoppages). As you can see from the photos, those kids liked me so much. I need at least 4 demonstrators to keep them in order. They were very lovely. Some of them asked the price of me-they wanted to buy me! My demonstrator answered: you can make your own robot if you become an engineer in the future (I won’t tell you the reason was I am not stable enough to sell). I hope I inspired them!

In the past three years, I have been demonstrated dozens of times in open days, exhibitions, social engagement activities, etc. I was happy to be there to make new friends, have fun with them, and arouse their interest in engineering.
Now you know how good I am.Let me show you myhistory. I have lots of different versions 1) Kinect 1.0(processing) + Arduino/myRIO/Raspberry pi, 2) Kinect 1.0(LabVIEW) + myRIO, 3) Kinect 2.0(LabVIEW) + Arduino/myRIO, plus 3 versions of body design.
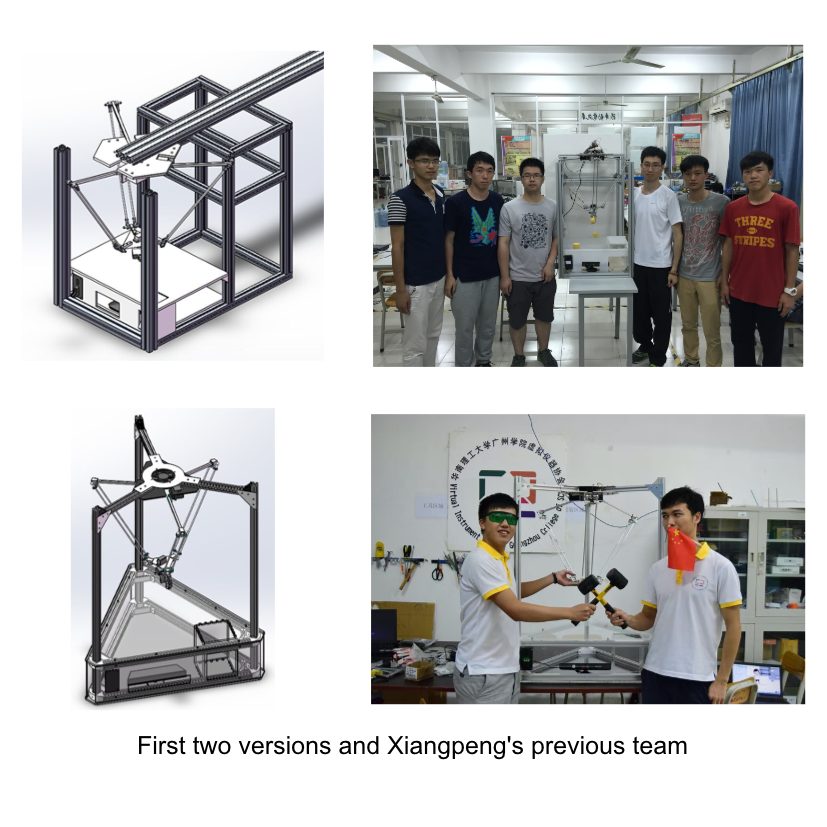
The primary idea of me, Kinect-controlled delta robot, was reported in [1]. Later on, Xiangpeng Liang and his previous team (Yusheng Wen, Jiahao Gao,Nuannuan Zheng et al.) in undergraduate made the first version (Kinect + myRIO)in around 2013. This prototype was demonstrated in NI Days, Beijing, 2016. Also, I won the first prize for “Challenge Cup” College Student Curricular Academic Science and Technology Works Competition of Guangdong Province.

After Xiangpeng joined meLAB in 2017 as a master student, the UK version of me was created by him, Léopold Deboosand Adnan Zahid led by Dr Hadi Heidari. I still remember they worked overnight in order to show me in the School Open Day the day after (30thAugust 2017). This was the first I was demonstrated in UK.

DuringXiangpeng’s absence of 2017-2018, I was improved by a master student, Andreas Kyriakou, using Kinect 2.0.
Another improvement in software was finished by Yongdian Sun (BEng student in 2018-2019) supervised by Xiangpeng, which was published in [2].
Afterwards, my mechanical structure was redesign by Elie Gautreau (Visitor from Icam, France) who is a young but smart and experienced mechanical engineer.
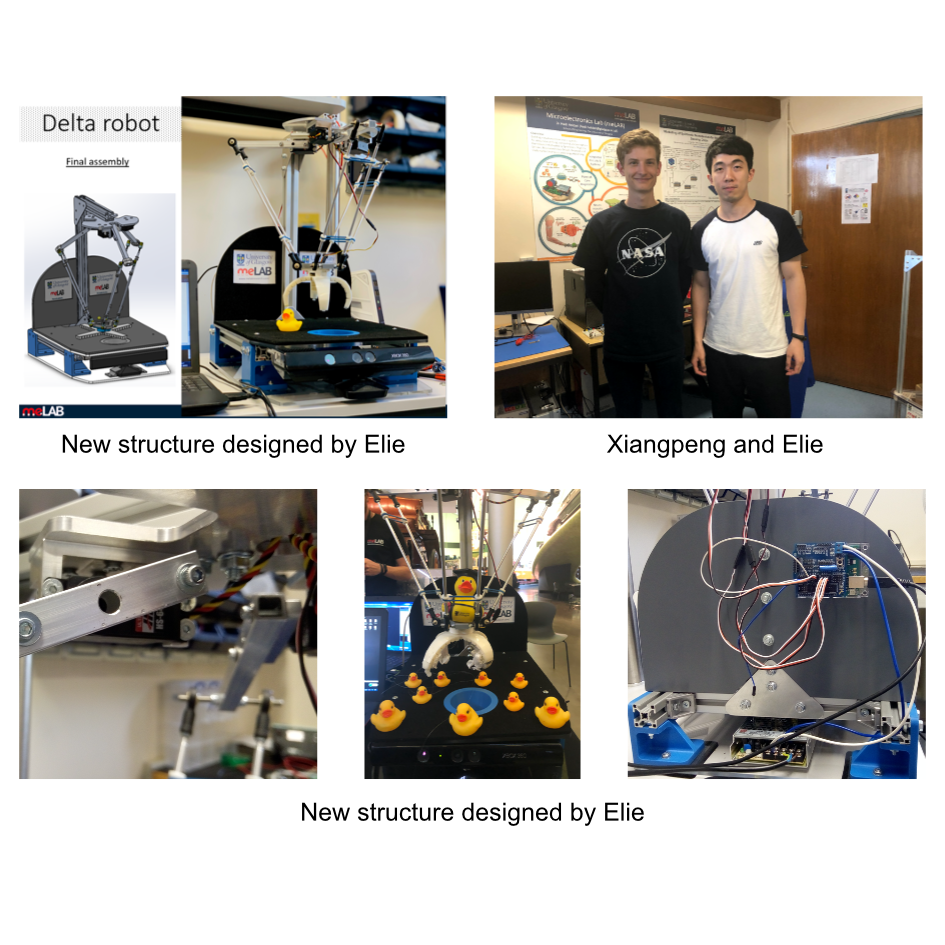
Look, I become smaller and more beautiful. I don’t need 4 people to carry me anymore. Also, Elie made a flexible gripper for me. I really like it! This is my favourite gripper ever! Let’s see how the latest version of me works:
Recently, my 5G friends, BurakKizilkaya, Zhen Meng,Dr. Guodong Zhao,Dr. Yusuf Sambo, Dr.Shuja Ansari et al., have started making a remote version of me. Let’s see what will happen!
Although I am not a main research topic in meLAB, I am happy to bring lots of fun to meLAB and my friends! I always appreciate those who are involved in developing me. Thank you!
Xiangpeng Liang is a research assistant who started with meLAB in 2017. He holds an M.Sc. in Mechatronics from the University of Glasgow, and a B.Sc. in Mechanical Engineering & Automation from Guangzhou College of South China University of Technology, China, 2016. His research interests include neuromorphic hardware, and wearable sensing systems.
[1] Melgar, E. R., & Diez, C. C. (2012). Arduino and kinect projects: Design, build, blow their minds. Apress.
[2] Sun, Y., Liang, X., Fan, H., Imran, M., & Heidari, H. (2019, August). Visual Hand Tracking on Depth Image using 2-D Matched Filter. In 2019 UK/China Emerging Technologies (UCET) (pp. 1-4). IEEE.




Comments
RSS feed for comments to this post